
Arriving at your destination on a dreary day, ATC queries you with “say approach requested.” The landing runway has an ILS and an RNAV (GPS) approach with identical LPV minimums published. Which do you choose? You would be forgiven for thinking, as we initially did, that this is a bit of an inconsequential question. WAAS has enabled satellite guided approaches to have precision comparable to Category I ILS approaches, so what difference does it make? Although true, this doesn’t mean that ILS and LPV are identical in all regards.
ILS approaches have been around and largely unchanged since the 1930s. WAAS became operational in 2003, and the first GPS approaches with LPV minimums were introduced in September of that year. Since then there have been 3998 approaches with LPV minimums published, whereas there are currently 1549 Category I ILS approaches published. GPS approaches with LPV minimums seem to be showing up everywhere these days, mainly because there is no need to build and maintain costly infrastructure at each airport to support them, as is the case for ILS.
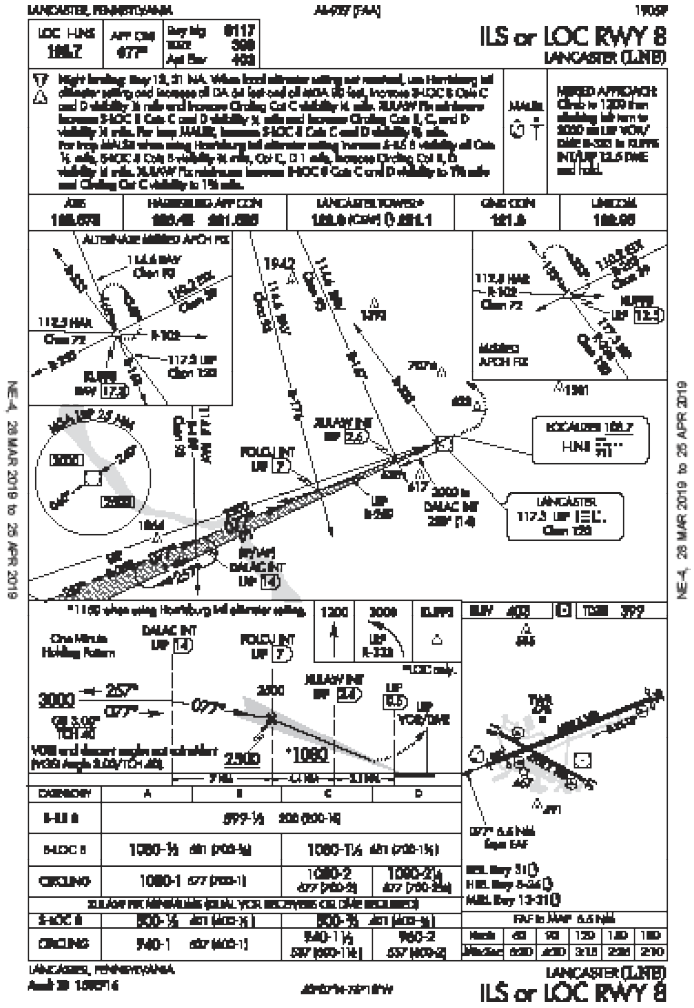
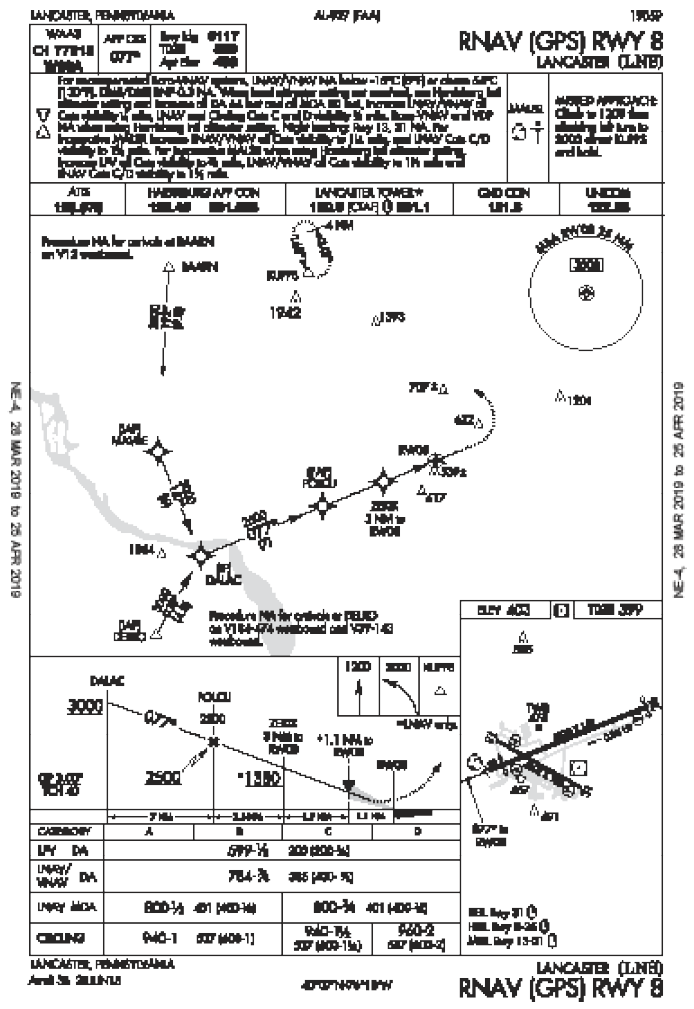
Fundamentally, LPV and ILS both accomplish the same thing—they get you down to the runway with similar precision, usually with similar minimums, and with equivalent skills needed. Many times they even follow the same ground track (this is the preferred design), such as on the ILS or LOC RWY 8 and RNAV (GPS) RWY 8 approaches at Lancaster, Pennsylvania (KLNS), which have common intermediate, final, and missed approach segments. Digging a little deeper reveals some differences to be aware of that will give you a better understanding of what exactly you’re signing up for when you request that approach.
Nuts, Bolts, and Satellites
When we talk about Category I ILS, we mean your normal garden-variety ILS approach with a decision height as low as 200 feet and visibility requirement as low as one-half statute mile (1800 RVR in some cases). Originally, LPV minimums only allowed decision heights as low as 250 feet. But in 2006 that was reduced to 200 feet making it equivalent to Category I ILS.
This change to the allowed LPV decision height is reflective of the evolving TERPS criteria used to develop satellite-based approaches. Originally the criteria for LPV minimums were similar to ILS, but slightly different, potentially resulting in slight differences in minimums. Over the years they have grown into alignment (in fact it was ILS criteria that came to mirror LPV). However, the criteria used to construct missed approaches still differ significantly between ILS and LPV. Therefore, it’s not uncommon to find otherwise similar ILS and LPV designs with completely different missed approaches. In some cases this can result in differences to the decision altitude between the two approaches.
The preferred alignment for both ILS and LPV is within 0.03 degrees of the runway course, but can be offset up to three degrees if necessary. If the offset for a ground-based procedure needs to exceed three degrees, an LDA approach with a glideslope can be developed with an offset of up to 15 degrees using essentially the same design techniques as the ILS. For LPV, three degrees offset is all you get. GPS LNAV/VNAV minimums allow offsets of up to 15 degrees, but are evaluated completely differently than LPV and encompass a larger area.
Considering infrastructure, a single ILS system installation supporting a single runway (typically) requires at a minimum a localizer antenna and a glideslope antenna. Oftentimes there is also a DME antenna, marker beacons, and/or a locator outer marker (LOM). Each of these antennas requires property, monitoring capability, maintenance, etc. Each of them also represents a potential point of failure for the system. It would certainly be an annoyance for the glideslope antenna to go on vacation while you’re halfway down final.
Running Interference
Since LPV requires no local infrastructure that can fail, so it’s better, right? It’s not quite that straightforward. LPV requires WAAS, which has a huge amount of ground-based and satellite infrastructure. Luckily it’s distributed and fault tolerant, but hiccups are possible. This is why your GPS navigator monitors the system integrity and has integrity requirements before switching to approach mode.
GPS is somewhat susceptible to interference from space weather, such as geomagnetic storms, that affect the signal transmitted by satellites. The GPS satellites are also susceptible to damage from space debris (Have you seen Gravity?), which could impact service availability. Assuming all’s well in space, GPS is particularly sensitive to ground-based interference and purposeful jamming due to its low signal strength at the surface. To that end, the U.S. Department of Defense frequently conducts GPS jamming exercises that deny service to civil aircraft over large areas (check NOTAMS, and see “What If GPS Doesn’t?” in the May 2017 issue).
Frequency interference is also a consideration for ILS. The ILS localizer and glideslope signals originate near the approach runway, and can be affected by obstacles and aircraft that get in the way. This is why you’ll sometimes see ILS critical area markings on taxiways to avoid impact on ILS system signals, depending upon the location and type of antenna, the location of taxiways, and the types of expected operations. So if you’re told to hold short of the critical area, the pilot inbound on the approach would appreciate it if you complied to keep the ILS signal steady.
Sometimes ground interference can disrupt or distort the glideslope signal, but the perturbations are short-lived and minor enough to be damped out by the glideslope needle and are nearly transparent to the pilot. However, when a coupled approach is flown, an autopilot has no such damping and could try to chase these signal fluctuations. This often results in a wild ride that has been likened to riding a paint mixer. If this is reported by flight inspection, there will be restrictions placed on autopilot-coupled approaches below certain altitudes. As they don’t rely on local signals, LPV glideslopes do not have such limitations.
Operational Differences
Although similar in outward appearances, only ILS is considered to be a precision approach. For arcane reasons, LPV (as well as LNAV/VNAV and LDA with glideslope mentioned earlier) is considered an approach with vertical guidance (APV) rather than a precision approach. Operationally this is mostly trivia, but it does result in a minor difference in alternate planning. When standard alternate minimums apply, since ILS is a precision approach a 600 foot ceiling is required at the alternate, whereas since LPV is not considered a precision approach, an 800 foot ceiling is required. This nuance is easy to overlook since we think of LPVs as precision approaches.
The ILS localizer and glideslope indications on the CDI are increasingly sensitive as you near the transmitters. The CDI sensitivity on an LPV approach scales similarly, but as you approach the runway threshold on an LPV approach, the scaling becomes linear, meaning the CDI sensitivity will remain constant while you’re near and over the runway. Another benefit of LPV approaches is that there is no hazard of false glideslope indications, which are a side-effect of ILS glideslope signal generation and are projected above the real glideslope in multiples of the glideslope.
There’s a recent trend in procedure design that blends some of the topics discussed here by introducing more GPS transitions to ILS approaches. On these procedures, some or all of the transitions have a “GPS REQUIRED” note nearby and feature thestar-shaped RNAV waypoint symbol rather than theconventional triangle symbol. These designs are being introduced to enable non-WAAS GPS-equipped aircraft to transition to fly approaches with lower minimums, making it sort of a back-door LPV approach.
Not surprisingly, compared to an ILS, there’s less to consider when preparing to fly an LPV approach other than ensuring your navigation database is up to date. With an ILS you need to ensure the frequency is tuned and identified. Also if you’re navigating en route using GPS, you must remember to switch to VLOC mode to use the ILS as the source for your navigation needles or be familiar with your navigator’s auto-switching.
Which to Choose
First, if this is your alternate, note that the LPV is not a precision approach for planning. Next, the mins might be different, dictating your choice. (For example, the Monterey, CA—KMRY—ILS 10R can go to 200 feet AGL, but the 10R LPV stops at 520.) Next, look at the missed approach procedure to see if it’s compatible with your capabilities. Also, are you comfortable with the buttonology required for the ILS?
Are there any outages? GPS Interference testing might render the LPV unavailable, or you might prefer the LPV if the ILS prohibits autopilot coupled approaches.
At the end of the flight, both ILS and LPV are perfectly acceptable approaches. So, once you’ve considered all of the unique characteristics, sources of potential trouble, and the items we’ve discussed, if no choice emerges, pick what you like.




Good article. I am going to run both with my CFI ( who is a First Officer for Alaska ).
Lots here I did not remember from recent GPS & ILS approaches in WA State.
We fly a 182A with a 430W – ADS-B in & out – model 30 Auto pilot.
Thanks,
JMHD
Under new ACS with Faa, an LPV my be be counted as a precision approach IF, the ceiling is less than 300 ft. If this is in this article I didn’t see it. I don’t think I’ve ever flown a paint mixer ILS. Strange analogy.
Just to clarify, according to the current (June 6, 2019) Airman Certification Standards (ACS) for the Instrument Rating flight exam,
“an LPV minimums approach can be used to demonstrate precision approach proficiency if the DA is equal to or less than 300 feet HAT.”
It’s the DA, not the ceiling that is used to determine if one can use an LPV for a precision approach on a checkride. LPV’s still only count as non-precision approaches for determining alternate requirements.
Great article, BTW, especially for us “older” pilots (1st FAA checkride in 1982).
GPS susceptible to space debris? “Gravity”? Really??
Besides the fact that Gravity was wildly unrealistic in regards to space debris, GPS satellites are in a half-geosynchronous orbit (10,000 nm) where there is a LOT less space debris than in low earth orbit. Not to mention that the military tracks all space objects beyond a certain size.
As far as I know (and I work in the space industry) there has never been any GPS, or really any active military satellite, damaged or destroyed by space debris. This is certainly not a reliability issue for users of GPS.
Good article. It is my understanding that you can’t classify an approach as a Precision Approach unless there is the appropriate lighting and painted lines on the runway. In fact, if my memory is correct, you must have a parallel taxiway rather than allow back taxing on a declared precision runway. There are many LPV approaches published at airports that have runways missing some, or all of these requirements; therefore, they cannot be classified as a Precision Approach.
ILS guidance cone continues to tighten beyond the runway threshold. LPV stops at changing at runway threshold.